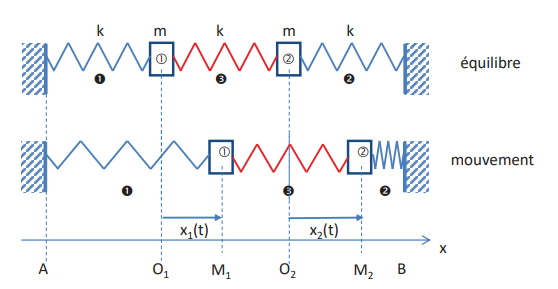
Etude du mouvement d'oscillateurs couplés:
Grâce à la Loi de Hooke:
$$\vec F_1=-kx_1\vec i$$
$$\vec F_2=k(x_2-x_1)\vec i$$
$$\vec F_4=-kx_2\vec i$$
$$\vec F_3=-k(x_2-x_1)\vec i$$
On applique le Deuxième loi de Newton - Principe fondamental de la dynamique pour chaque mobile:
$$\begin{cases}m\ddot x_1=-kx_1+k(x_2-x_1)\\ m\ddot x_2=-kx_2-k(x_2-x_1)\end{cases}$$
$$\begin{cases}\ddot x_1=-2\omega_0^2x_1+\omega_0^2x_2\\ \ddot x_2=-2\omega_0^2x_2+\omega_0^2x_1\end{cases}$$
Principe de découplage
On cherche alors:
$$\begin{cases}x_1=aq_1(t)+cq_2(t)\\ x_2=bq_1(t)+dq_2(t)\end{cases}$$
Avec:
$$\begin{cases}q_1=A\cos(\omega_1t+\phi_1)\\ q_2=B\cos(\omega_2t+\phi_2)\end{cases}$$
Où \(q_1\) et \(q_2\) sont solutions de:
$$\begin{cases}\ddot q_1=-\omega_1q_1=\lambda_1q_1\\ \ddot q_2=-\omega_2q_2=\lambda_2q_2\end{cases}$$
Utilisation de la forme matricielle:
$$\vec {\ddot X}=M\vec{X}\qquad\text{avec } \vec X=\begin{pmatrix}x_1\\ x_2\end{pmatrix}\text{ et }M=\begin{pmatrix}-2\omega_0^2\qquad \omega_0^2\\ \omega_0^2\qquad -2\omega_0^2\end{pmatrix}$$
$$\vec {X}=P\vec{Y}\qquad\text{avec } \vec Y=\begin{pmatrix}q_1\\ q_2\end{pmatrix}\text{ et }P=\begin{pmatrix}a\qquad c\\ b\qquad d\end{pmatrix}$$
$$\vec {\ddot Y}=\lambda\Bbb I\vec{Y}\qquad\text{avec }\text{ et }M=\begin{pmatrix}\lambda_1\quad 0\\ 0\quad\lambda_2\end{pmatrix}$$
Avec: \(\lambda_1,\lambda_2\) les valeurs propres de la diagonalisation.
On peut alors écrire:
$$M\vec X=\ddot {\vec X}=\frac{\partial^2\vec X}{\partial t^2}\vec X=\frac{\partial^2 P\vec Y}{\partial t^2}=P\vec{\ddot Y}=P(\lambda\Bbb I\vec Y)=\lambda\Bbb I.P\vec Y=\lambda\Bbb I\vec X$$
Soit:
$$M\vec X=\lambda \Bbb I\vec X$$
On cherche alors les vecteurs propres associés aux valeurs propres \(\lambda\)
On diagonalise et on trouve:
$$\begin{cases}\omega_1=\omega_0\\ \omega_2=\sqrt 3\omega_0\end{cases}$$
$$\begin{pmatrix}a \\ b\end{pmatrix}=\begin{pmatrix}1\\ 1\end{pmatrix}$$
Et
$$\begin{pmatrix}c\\ d\end{pmatrix}=\begin{pmatrix}1\\ -1\end{pmatrix}$$
Finalement:
$$\begin{cases}x_1=q_1(t)+q_2(t)\\ x_2=q_1(t)-q_2(t)\end{cases}$$
Avec:
$$\begin{cases}q_1(t)=A\cos(\omega_0t+\phi_1)\\ q_2(t)=B\cos(\sqrt3\omega_0 t +\phi_2)\end{cases}$$